To improve the customer experience, what you need to understand is
the distribution of strategy performances for a given algorithm on
real-world graphs, not the theoretical worst case.
Of course, that’s a simplification. Theoretical worst-case
performance does impact the customer experience, either on
accident or because some adversary wants to throttle your program. Worry
less if your “customer concerns are well-isolated,” but they rarely
are.
By “real-world graphs” I suggested a family of associations graphs,
distinct from the family of all possible associations graphs, might
describe the bulk of customer desires. For example, if the typical
customer associates Contacts, Deals, and other objects via a mutual
association with a Company, those customers’ “real-world graphs” will
approximate stars with
the Company at the center.
Parameterizing those graph families, you can simulate the candidate
algorithms’ performance against a wide range of possible customer
configurations (even configurations impossible in practice, e.g. because
of a limit on the number of HubSpot types).
Experiment space
All the uncertainty about what’s “real-world” translates into a huge
experimental space. Any given experiment embeds a set of assumptions
about what the user probably wants and what they have in HubSpot. All
the experiments taken together are only useful if they describe the
problem well enough, in all its dimensions, to react to user information
as it comes in.
Most of the variables here are discrete categories — different vertex
cover algorithms, different topological families of graphs, and
different weighting schemes for vertices. For these purposes, there
isn’t a continuous space between Vazirani’s algorithm and Lavrov’s.
Some of those categories introduce scalar variables, like the size of
a random graph or the probability two vertices are adjacent.
Vertex cover algorithms
An unweighted vertex cover algorithm will neverk-approximate a minimal weighted
vertex cover. Unweighted algorithms behave as if all vertices have the
same weight, then minimize the number of vertices in the cover Vreq. When you add
weights to G = {V, E}, Vreq might be arbitrarily
bad: each vertex in Vreq can be arbitrarily
expensive, and vertices in V − Vreq can be
arbitrarily cheap.
Obviously the best an unweighted algorithm can perform on a
weighted graph is to accidentally suggest the weighted optimal
strategy.
How should we expect it to perform given a random distribution of
weights? I think of a single graph with its topology-determined minimum
unweighted vertex cover Vreq. The expected weight
of that vertex cover is μ∥Vreq∥ where
μ is the mean of the weight
distribution.
What if weights aren’t distributed randomly, and instead correlate
with graph topology? I’m not sure what to expect. That question is
easier to simulate than to theorize.
I implement three of the algorithms discussed in my last post.
The punchline: this algorithm isn’t clever. It performs so
badly on tricky graphs it doesn’t k-approximate minimal vertex covers.
To this algorithm’s credit, it has an intuitive heuristic: add the
highest-degree vertex in G to
Vreq, remove it
from G, and recurse for a
minimal vertex cover on what remains.
lavrov
the “2-approximating [unweighted] vertex cover” variation suggested
by Mikhail Lavrov:
Start with Vreq = ∅. Then, as long
as Vreq doesn’t
cover every edge, we pick an uncovered edge and add both
endpoints to Vreq.2
My implementation is an even greedier variant, at the cost of some
runtime complexity: rather than arbitrarily picking an uncovered edge,
it picks the uncovered edge with the highest combined degree between its
incident vertices. Lavrov proves the 2-approximation.
vazirani
The only weighted vertex cover algorithm I implement. Rather
than removing vertices outright, it relaxes virtual weights t(v) for the vertices
incident on a “taken” (uncovered) edge, then adds one or both to Vreq depending on the
result. My implementation leaves edge-selection arbitrary, per
Vazirani’s definition.3
As the only k-approximation
of a minimum weighted vertex cover, it’s safe to assume
vazirani should perform the most stably. That
doens’t moot the experiment. As I noted, there are
graphs where it yields a worse result than clever!
Topologies
Well, what’s a “real-world graph?” In the absence of customer data —
I don’t have any — we can try simulating several parameterized
families of graphs instead of just guessing. I implement two
families.
random
A graph with n vertices. Any
pair v1, v2 ∈ V
are connected with probability p. Notably, these graphs have a
nondeterministic total connectivity — there’s always a p2n
chance of getting a complete graph! — but that’s just a reason to
simulate repeatedly.
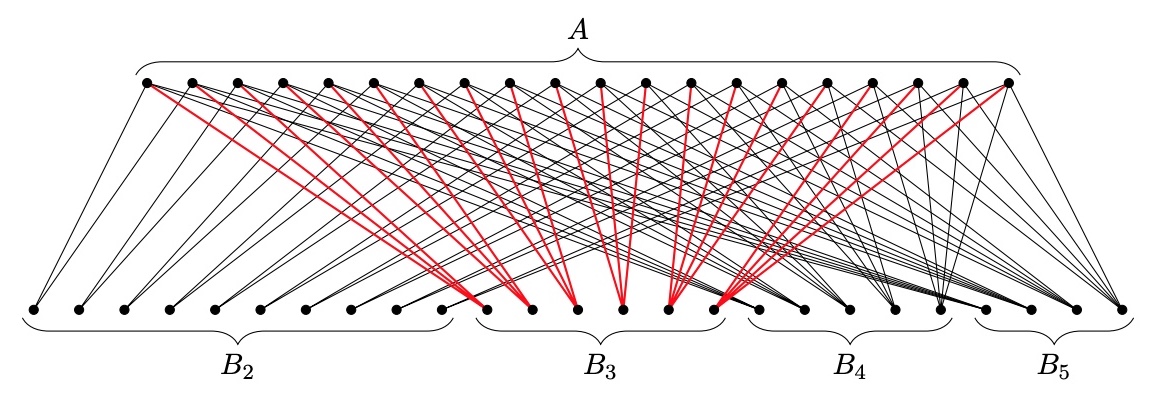
tricky
“Tricky” graphs follow a construction from Lavrov designed to force
the clever algorithm into arbitrarily bad vertex covers.
Instead of taking a number of vertices, the construction starts with
integers a and k ≤ a; then
On one side of the graph, put n vertices, for some (large) n. Call the set of these vertices
A.
On the other side of the graph, put k − 1 “blocks” of vertices, numbered
B2, B3, ..., Bk.
Block Bi
will have ⌊n/i⌋
vertices.
Each vertex in A gets one
edge to a vertex in Bi, and they are
distributed as evenly as possible: each vertex in Bi ends up with
either i or i + 1 neighbors in A.4
From Lavrov (2020): a “tricky” graph with
n = 20 and k = 5. The edges adjacent on B3 illustrate each B-group is adjacent to all of A.
What makes it tricky? Initially the highest-degree vertices are in
Bk. When
clever has included those in the cover Vreq, the highest-degree
vertices are in Bk − 1. This
continues until Vreq = B2 ∪ B3 ∪ ... ∪ Bk,
even though there’s a smaller vertex cover staring right at us: A!
These graphs have a ⋅ Hk
vertices, where Hk is the kth harmonic
number: ∥A∥ = a
and ∥Bi∥ = (i−1)a.
There are potentially many more families to explore. Like I mention
above, stars might capture HubSpot’s ontology for built-in types well:
it’s a CRM, so pretty much everything associates, directly or
indirectly, with a Company. Graphs composed of stars, joined at the
leaves, might reflect HubSpot customers using custom objects to hang
subontologies off of the built-in types: a Company’s association with a
Deal indirectly associates it with a collection of Deal-specific custom
object types.
I considered testing a “small-world”
family of graphs, with vertices highly-adjacent to “neighbors” and
adjacent to non-“neighbors” with some lower probability, but I’m not
sure it’s relevant to the HubSpot problem definition. There’s no natural
concept of “neghbors” among HubSpot object types. Remember: customer
“configurations” are subgraphs of a complete graph of types.
Emergent graphs — especially physical networks — may well have
small-world properties, but it’s less clear why a subtractive
configuration-selection process would yield them.
Weight schemes
The cost of requesting the objects of a HubSpot type is the number of
members divided by the APIs request page size. How many objects of each
type exist? Who knows! Like with graph families, it’s easier to simulate
several of them than to evidence-free agonize over which is
“realest.”
uniform
Assigns every vertex the same weight, unweighting the vertex cover
problem.
random
Assigns each vertex a random weight on the half-open interval [0, 1).
degree-negative
A weight scheme where a vertex’s weight is negatively correlated with
its degree. To keep weights positive, I use (d(v)+ϵ)−1,
where ϵ is a small positive
constant to prevent divison-by-zero panics on disconnected vertices.
degree-positive
Each vertex’s weight is its degree.
degree-positive-superlinear
Each vertex’s weight is the square of its degree.
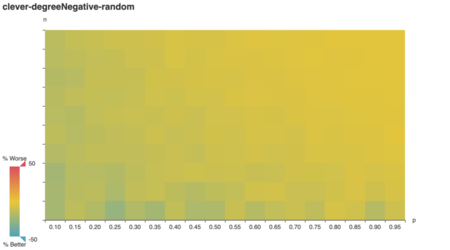
I expect degree-negative and
degree-positive to reward and punish the
clever algorithm, respectively. clever gobbles
high-degree vertices into Vreq oblivious to their
weight. In one case that greedy strategy correlates with low weights, in
the other case with high.
Project structure
Why reach for Go? My first instict was to use built-in
benchmarking to compare algorithms. That is a cool tool
(one of my favorite take-home interview hacks) but I don’t wind up using
it. Runtime performance is just too dependent on implementation details;
I’m better off spending my time building a graph package
with a decent interface than, say, using separate graph implementations
optimized for each algorithm.
There are other, better reasons to write Go. Static types prevent a
suite of bugs I’d encounter in Python — Go’s a “when it compiles, it
does what you mean” experience — and module management is simpler than
in Typescript. The standard testing library is pleasant.
godoc is built in, and linters abound.
The stand-out advantage, I found, is a convention: the standard Go
project layout, which separates reusable library code in
pkg subdirectories from applications in cmd,
is well-suited to experimentation. I wound up with a project structure
like this:
README.md
pkg
graph
cover
cmd
01-lavrov-clever
README.md
main.go
02-clever-vazirani
03-another-experiment
The simulation models depend on one another, but they’re independent
of the experiments that use them. pkg/graph exports
weighted and unweighted graphs, along with some known graphs used in
tests. pkg/cover implements vertex cover algorithms on
those graph types.
Both packages include tests. Testing is especially useful in
pkg/cover, where it tests two kinds of correctness: that my
code behaves how I expect it to, and that my expectations match
the algorithm definitions in literature! By testing on known graphs
(defined in pkg/graph/fixtures.go), I check my
implementations match examples from papers.
TestClever_Tricky confirms clever selects
Vreq = B
like Lavrov claims; if it doesn’t, there’s some mistake in the
implementation even if it yields valid vertex covers.
Experiments go in subdirectories of cmd. Each directory
is space for notes, outputs, experiment-specific helper code, and so on.
Because there’s no risk of one experiment impacting the others — there
aren’t interdependencies in cmd — these are
scratchpads.
In summary:
Put reusable simulation components in pkg.
Use unit tests to confirm your implementations against prior art
examples.
Explore in cmd.
Next time I might reach for a scientific computing package like Gonum to aggregate data in
experiments. It even ships with a graph
package, albeit one suited for edge-weighted problems over
vertex-weighted ones.5
Simulations
Any pair of experiments should be comparable at a glance. Absolute
vertex cover weights are sensitive to graph topology and individual
vertex weights, which makes it hard to compare an algorithm’s
performance on a ten-vertex graph against another algorithm’s
performance on a hundred-vertex graph.
Instead, since my goal is to compare algorithms, I measure
relative cover weight against a baseline:
vazirani. Because it’s a 2-approximation, it guarantees a
bound on any algorithm’s relative performance: if it’s implemented
correctly, nothing can do more than 50% better than
vazirani.
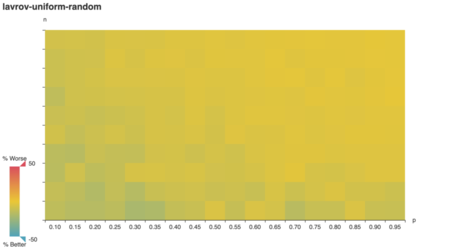
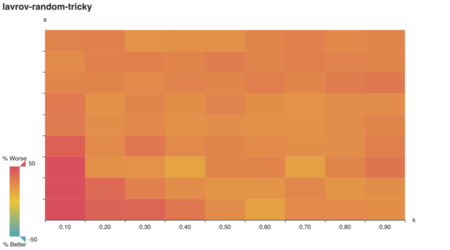
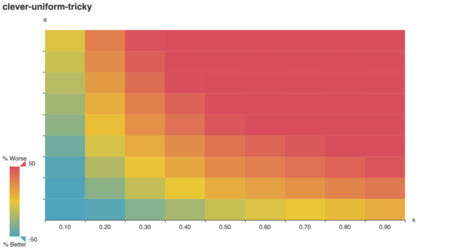
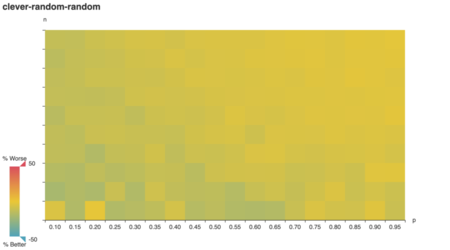
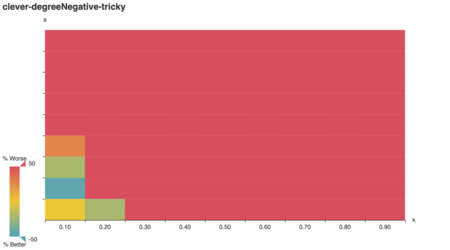
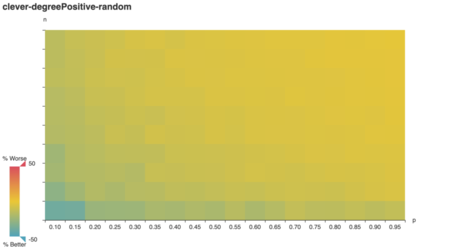
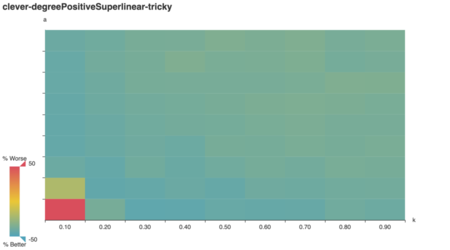
In the heatmaps below,
-50 (teal) denotes a vertex weight 50% better than
vazirani on the same graph.
0 (yellow) denotes a vertex weight at parity with
vazirani.
50 (red) denotes a vertex weight 50% worse than
vazirani. Worse performances are the same deep red —
without a k-approximation, an
algorithm can be worse up to the total weight of V!
Each cell averages ten relative performances: ten times, the
simulation generates a graph G
with the given parameters, then finds vertex covers on that G with the vazirani and
tested algorithms.
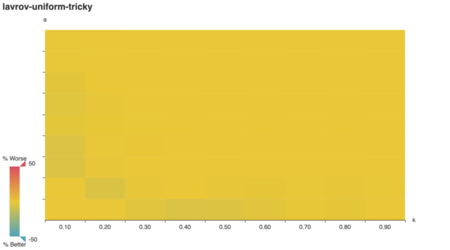
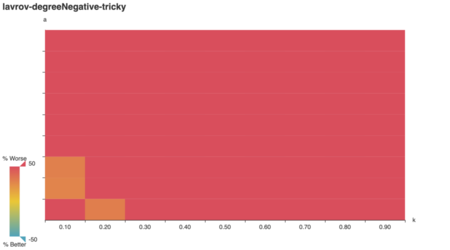
For starters, we can visually confirm a behavior predicted in
literature: Lavrov’s tricky graphs are designed to
arbitrarily damage the clever algorithm’s performance.
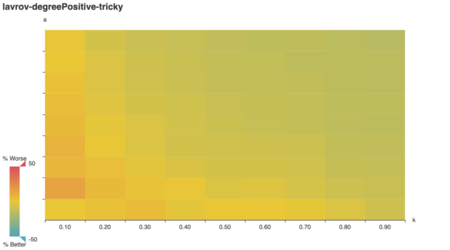
As Lavrov suggests, the “clever” algorithm is tricked for large a, k. (Note: while k is an integer in Lavrov’s
tricky graph construction, here it’s expressed as a
multiple of the number of vertices in A.) Does the lavrov
algorithm do better?
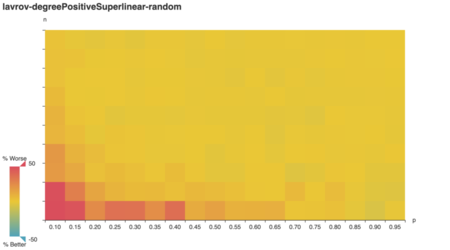
Indeed it does! Strikingly, lavrov performs just as
well as vazirani on a uniformly-weigted graph. Upon
reflection, I realize vazirani and lavrov are
equivalent in a uniformly-weighted context: t(v) always goes to zero
for uandv at every step, because both have
the same starting weight!
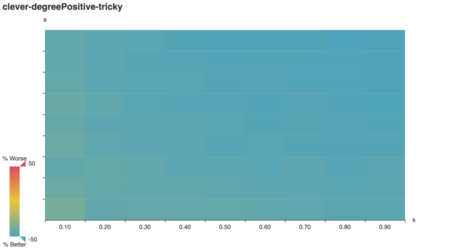
To my surprise, clever outperformed
vazirani on tricky graphs when vertex weights corresponded
1:1 to degree.
On reflection, this makes sense too. Any vertex cover of a
degree-positive-weighted graph covers every edge, which
means it has a minimum weight ∥E∥. By minimizing redundant
coverage, clever approximates that optimal cover. Since
vazirani is a 2-approximation, the optimal cover is at most
50% better.
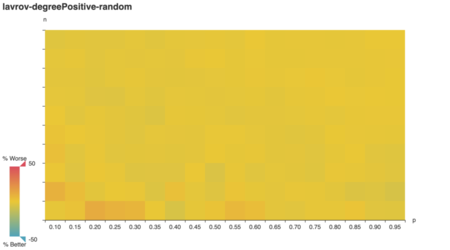
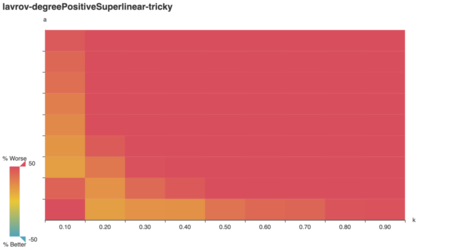
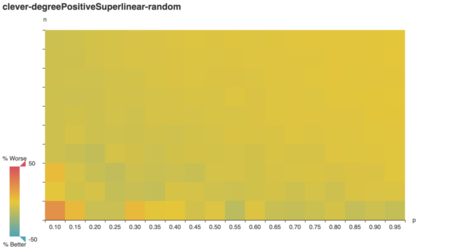
What if vertex weights are superlinearly positively
correlated with vertex degree?
Huh! To my surprise, except for a low-n low-k blip, cleverstill generally outperforms vazirani. Even
weirder:
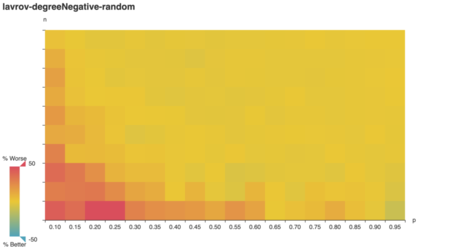
I expected degree-negative weighting would reward the
clever algorithm for picking high-degree vertices, but it
doesn’t!
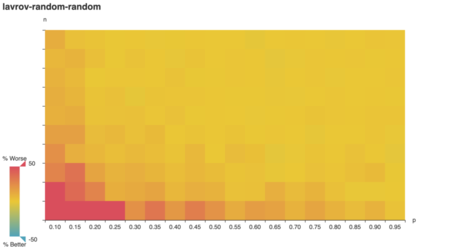
lavrov overview
A weight-naïve version of vazirani, lavrov
achieves parity when it isn’t punished for weight-naïveté (when weights
are uniform). Otherwise, vazirani’s
performance lower-bounds it; you’d only prefer lavrov if
you need its programmatic simplicity.
Weight/Topology
random
tricky
uniform
random
degree-negative
degree-positive
degree-positive-superlinear
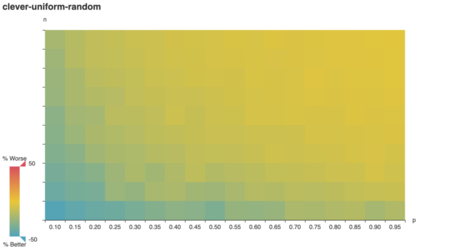
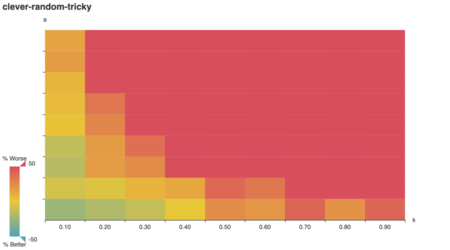
clever overview
As expected, clever does poorly on tricky
graphs with uniform and random vertex
weights.
Unexpectedly, it performs quite well on tricky graphs
where vertex weight correlates positively with vertex degree! In
domain-specific terms, that suggests clever is good choice
if your HubSpot account’s most-associated types are also your most
numerous collections.
I still gut-distrust this conclusion. It’s just so easy to think up a
small but plausible associations graph where clever’s
dismal because, say, you have hundreds of thousands of Contacts.
Weight/Topology
random
tricky
uniform
random
degree-negative
degree-positive
degree-positive-superlinear
If you want to poke around the experimental results, check out the
full set of interactive
graphs. If you want to reproduce them or inspect my implementations,
see the source
code on GitHub.